ДИСКРЕТНО-СТОХАСТИЧЕСКИЕ МОДЕЛИ
(Р-схемы)
|
||
|
При дискретно-стохастическом подходе к формализации процесса
функционирования системы S подход остается аналогичный рассмотренному конечному
автомату, то влияние фактора стохастичности можно проследить разновидности
таких автоматов, а именно на вероятностных (стохастических) автоматах. В общем виде вероятностный
автомат (англ. probabilistic automat) можно определить как дискретный потактный преобразователь информации с памятью,
функционирование которого в каждом такте зависит только от состояния памяти в
нем и может быть описано статистически. Применение схем вероятностных автоматов (Р
- схем) имеет важное значение для разработки методов проектирования дискретных
систем, проявляющих статистически закономерное случайное поведение, для
выяснения алгоритмических возможностей таких систем и обоснования границ
целесообразности их использования, а также для решения задач синтеза по
выбранному критерию дискретных стохастических систем, удовлетворяющих заданным
ограничениям. множество G, элементами которого являются всевозможные пары Введем в рассмотрение более общую математическую схему. Пусть Ф —
множество всевозможных пар вида
При этом Пусть элементы множества G индуцируют некоторые законы
распределения на подмножествах Y и Z, что можно представить соответственно в
виде:
При этом Если для всех k и j имеет место соотношение определение выходного сигнала Р-автомата зависит лишь от того
состояния, в котором находится автомат в данном такте работы. Другими словами,
пусть каждый элемент выходного подмножества Y индуцирует распределение
вероятностей выходов, имеющее следующий вид:
Здесь для всех k и i имеет место соотношение Понятие Р-автоматов Мили и Мура введено
по аналогии с детерминированным F-автоматом, задаваемым Y-детерминированный Р-автомат задаётся таблицей переходов и
таблицей выходов. Первую из этих таблиц можно представить в виде квадратной
матрицы размерности К´К, которую будем называть матрицей
переходных вероятностей или просто матрицей переходов Р-автомата. В общем
случае такая матрица переходов имеет вид
Для описания Y-детерминированного Р-автомата необходимо задать
начальное распределение вероятностей вида
Здесь dk — вероятность того, что в
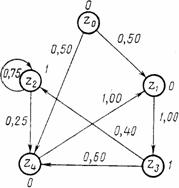
начале работы Р-автомат находится в состоянии k. При этом Y-детерминированный Р-автомат можно задать в виде ориентированного
графа, вершины которого сопоставляются состояниям автомата, а дуги — возможным
переходам из одного состояния в другое. Дуги имеют веса, соответствующие
вероятностям перехода рij, а
около вершин графа пишутся значения выходных сигналов, индуцируемых этими
состояниями рис 1.
рис 1. Р-автоматы могут использоваться как генераторы марковских
последовательностей, которые необходимы при построении и реализации процессов
функционирования систем S или воздействий внешней среды Е. Для оценки различных характеристик исследуемых систем,
представляемых в виде Р-схем, кроме случая аналитических моделей можно
применять и имитационные модели, реализуемые, например, методом статистического
моделирования. |
||