Блок «Датчик расстояния»
|
||||||||||||||||||||||||||||||||||||||
|
Этот
блок может обнаружить объекты на расстоянии до 250см(100 дюймов). Используя
шины данных, блок может передавать текущее значение ультразвукового сигнала и
логическую команду («истина» или «ложь») в зависимости от того, выше или ниже
текущий сигнал, чем пороговое значение срабатывания. Пороговое
значение – это определенное значение из диапазона, в котором происходит
изменение условий. Например, можно запрограммировать робота на столкновение,
если он приближается к объекту ближе 76 см(30 дюймов), то есть попадает в
пределы максимального диапазона действия датчика расстояния. Пороговое значение
будет равно 30. Для блока « датчик расстояния» по умолчанию сигнал «истина» выдается при
приближении к объекту менее чем на 127см(50 дюймов). Совет: как установить
пороговое значение для датчика расстояния? Если вы хотите, чтобы при приближении робота противника к вашему роботу выдавалась команда "истина", направляйте свой датчик расстояния на робота-противника (или на иной объект с такой же отражающей способностью), когда он находится на различных расстояниях от датчика. Наблюдайте за показаниями датчика расстояния в поле обратной связи. Если ваш датчик «засёк» робота-противника на расстоянии около 127 см (50 дюймов), и вы не хотите, чтобы он подъёхал к вашему роботу ещё ближе, вы можете установить пороговое значение на 50 (127). Теперь, если объект с такой же отражательной способностью окажется ближе 127 см (50 дюймов), ваш Блок «Датчик расстояния» выдаст команду "истина". Подключив шину данных к Блоку «Датчик расстояния» или к Блоку «Мотор», вы сможете начать атаку или отступление. Отображение
параметров настройки блока (рис. 1):
Рисунок 1. Пиктограмма Блока «Датчик
расстояния». Число указывает, к какому из портов NXT подключен к датчику расстояния. При необходимости это число можно изменить в панели настройки. Эта пиктограмма показывает, как настроен датчик расстояния: на обнаружение близких или удаленных объектов. Чем больше цветных полосок, тем длиннее дистанция обнаружения. Когда блок перетащен в рабочую область, его концентратор данных открывается автоматически. Хотя бы одну шину данных следует протянуть с выходного разъёма данного блока на концентратор данных другого блока. Пороговое значение можно задать динамически, если подключить шину данных входа. (Дополнительную информацию см. в разделе "Концентратор данных".) Настройка Блока
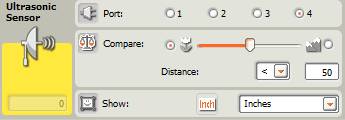
«Датчик расстояния» (рис. 2):
Рисунок 2. Настройка
Блока «Датчик расстояния». Выберите порт, к которому подключен датчик расстояния. По умолчанию для него назначается порт 4. При необходимости эту настройку можно изменить. Если активировать левую (от движка) кнопку выбора, блок запустится при регистрации объекта, находящегося на расстоянии меньшем, чем пороговое значение; активируйте правую кнопку выбора, чтобы запускать блок при регистрации объекта на расстоянии большем, чем пороговое значение. Установите пороговое значение ползунком или впечатайте непосредственно в поле ввода (0–250 , для измерения в сантиметрах, или 0-100 для дюймов). Учитывайте то, что объекты с высокой отражающей способностью можно обнаружить на большем расстоянии, чем слабо отражающие объекты. Выберите единицу измерения регистрируемых значений - сантиметры или дюймы. Поле обратной связи отображает текущие показания датчика расстояния (0-250 см, или 0-100 дюймов). Значение "0" соответствует наименьшему расстоянию, которое может зарегистрировать датчик. Если выбраны сантиметры, цифра 250 означает максимальное расстояние, на котором датчик может работать (т.е., приблизительно, 250 см). Если выбраны дюймы, цифра 100 означает максимальное расстояние, на котором датчик может работать (т.е., приблизительно, 100 дюймов). На этой схеме показаны различные характеристики разъёмов на концентраторе данных Блока «Датчик расстояния» (табл. 1) Таблица 1. Характеристики разъёмов на концентраторе данных Блока «Датчик расстояния».
|
||||||||||||||||||||||||||||||||||||||